Using the Vulcan Prosthetic Hand as a Parent
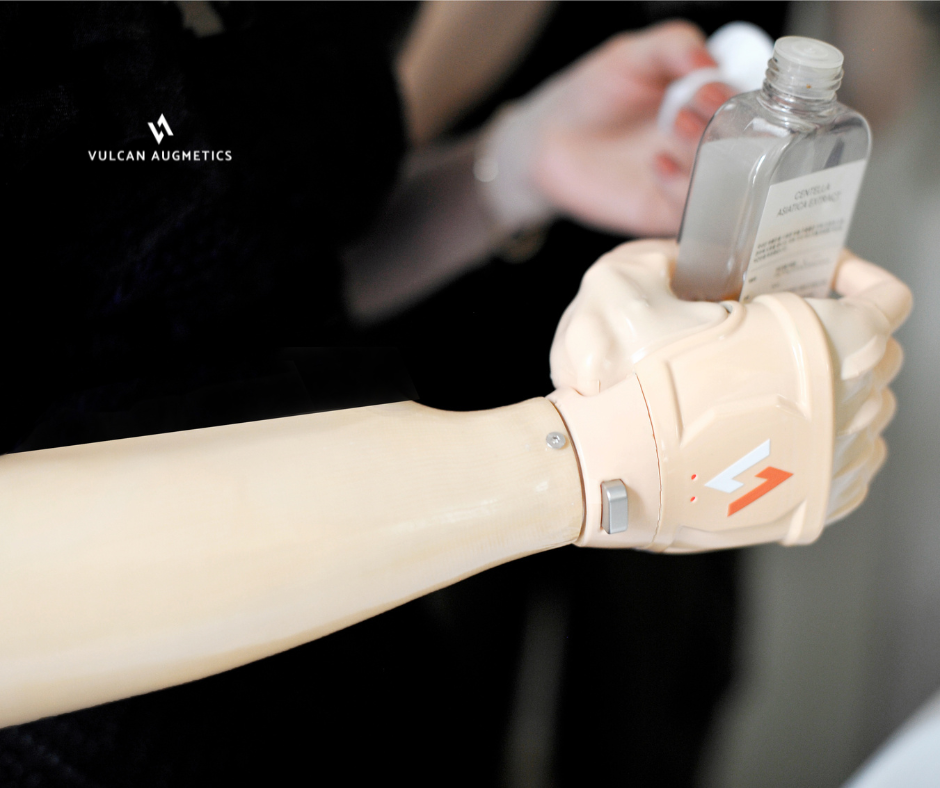
For many amputee parents in the Vulcan user community, the Vulcan Multi – grip Myoelectric prosthetic hand is more than just a modern assistive device. It’s a powerful tool that helps them not only manage daily tasks more easily, but also stay connected – physically and emotionally – with their children. In this article, we’re excited to share the stories of two Vulcan users, Mr. Nam and Ms. Quynh, and how their prosthetic hands help them fully engage in parenthood. Adapting to a New Normal After losing his arm in a workplace accident, Nam faced an overwhelming concern: how would he care for his young son alone while his wife lives nearly 4000 kilometers away in Japan? That question led him to Vulcan. On the day of his fitting, Nam was able to perform the basic functions of his prosthetic hand in just 20 minutes – one of the fastest adaptation cases we’ve seen. He successfully completed all of his initial training exercises, including picking up and pouring water, and even playing with LEGO bricks. By the end of his first week, Nam was already handling essential daily parenting tasks: Creating Everyday Joy For Quynh, one of the most heartwarming moments of her day is being able to hug her children when they get home from school – now, with both arms. She initially worried that her kids might feel embarrassed by her prosthetic hand, but instead, they are so proud of the new look of their mom. On her daughter’s graduation day, Quynh wore her Vulcan hand to the farewell party at school. She opened candy wrappers, cut the cake, and even shook hands with her daughter’s friends – all while surrounded by laughter and excitement. Instead of fear or hesitation, the children were fascinated with the fact that she had a “robot hand.” Live. Love. Laugh – with Vulcan The Vulcan prosthetic hand is more than a medical device. For parents like Nam and Quynh, it’s a bridge back to the small, meaningful moments to their family life – from everyday routines to unforgettable celebrations. Because nothing is more powerful than being able to live, love, and laugh with your children – without limits. We’re Here to Support You We hope the stories of Nam and Quynh brought a little inspiration to your day. If you’d like to learn more about how the Vulcan prosthetic hand can help you thrive as a parent, reach out to us for a personalized consultation.
Using the Vulcan Prosthetic Hand as a Parent Read More »